MotorGuide – Elektro-Bootsmotoren der Extraklasse
Motorguide ist ein etablierter Hersteller von Elektromotoren für Boote, insbesondere für Angelboote. Die Produkte umfassen verschiedene Modelle für den Bugbereich und Außenbordmotoren, die eine präzise Steuerung und leisen Betrieb bieten. Solche Elektromotoren sind ideal für Bootsbesitzer und Wassersportler, die auf Gewässern navigieren, wo Verbrennungsmotoren nicht erlaubt oder nicht erwünscht sind. Insbesondere profitieren ambitionierte Bootsangler und Profi-Angler von der hohen Leistung und Zuverlässigkeit dieser Motoren. Die hochwertigen Motorguide-Produkte sind im Online-Shop von myBait erhältlich und zeichnen sich dort durch ihre besondere Qualität und Langlebigkeit aus. <weiterlesen>
Motorguide Bugmotor

MotorGuide Bugmotoren sind für viele Angler die erste Wahl. Diese Elektromotoren verfügen über außerordentlich starke Leistung und ein sehr genaues GPS-System, sodass dein Boot mit dem Ankermodus an gewünschter Stelle bleibt oder Routen abfährt. MotorGuide weiß, worauf es Anglern bei Bugmotoren ankommt: Lange auf dem Wasser ausharren können. Denn nur so macht sich Geduld bezahlt – indem der Zielfisch anbeißt. Die Elektro-Bootsmotoren sind in verschiedenen Versionen erhältlich, die sich in Schaftlänge, Leistung und Ausstattung unterscheiden. Hier gelangst du zu unserem Sortiment.
Motorguide Heckmotor

Du liebst es, dich lautlos durchs Wasser zu bewegen und immer die perfekte Kontrolle zu haben? Dann sind die MotorGuide Heckmotoren genau dein Ding! Diese Motoren vereinen Power und Effizienz und machen jede Angeltour zum Highlight. Ob ruhige Gleitfahrt oder blitzschnelles Drehen – mit diesen Heckmotoren hast du immer die Nase vorn. Jetzt entdecken und deinen nächsten Angeltrip revolutionieren!
Motorguide Zubehör

MotorGuide bietet diverses Zubehör für seine Elektro-Bootsmotoren an. Seien es Montageplatten, Fernbedienungen, Fußpedale oder Kabel für unterschiedliche Verwendungszwecke. Mit ihnen holst du mehr aus deinem Bugmotor heraus und entdeckst seine neuen Facetten. Ein Adapterkabel ermöglicht dir, den integrierten Geber mit deinem Echolot zu verwenden oder je nach Modell sogar den Motor zu steuern. Montageplatten verschaffen dir die Möglichkeit, den Motor auf dem Boot rasch abzunehmen und anzubringen. Hier findest du alles rund ums Zubehör für deinen MotorGuide Motor.
Motorguide Ersatzteile

Wer kennt es nicht? Da will man mit dem Boot endlich zum Angeln hinausfahren und einen Dorsch, Wels oder Hecht fangen, aber der Bugmotor läuft nicht einwandfrei. Das kann viele Gründe haben. Einerseits bedarf der Elektromotor eine Wartung, weil die Verschleißteile abgenutzt sind, oder Bauteile haben einen Schaden erfahren und funktionieren daher nicht mehr ordnungsgemäß. In solchen Fällen hilft nichts anderes, als Ersatzteile für den MotorGuide Motor zu bestellen und ihn zu reparieren. Hier findest du unser Sortiment an MotorGuide Ersatzteilen in unserem Online-Shop.








Mit MotorGuide sind Kopf und Hände frei fürs Angeln
MotorGuide ist neben Minn Kota einer der führenden Hersteller für Elektro-Bootsmotoren im Angelsport. Der Hersteller hat es sich zum Ziel gesetzt, die Erwartungen ihrer Kunden zu übertreffen und sich so auf Entwicklung erstklassiger Motoren zu konzentrieren.

mit Lowrance Echoloten.
Die Elektromotoren Xi5 und Xi3 sind mit Pinpoint GPS erhältlich. Diese GPS-Technologie von MotorGuide arbeitet akkurat und bestimmt die Position deines Bootes um genau bis zu 1,5 m. Mit bis zu 105 lbs Schubkraft bieten die Bugmotoren zudem mehr als genug Leistung, um das Boot zu schleppen. Wer mehr Leistung braucht, findet sie im Tour Pro mit bis zu 109 lbs.
Diese Eigenschaften schaffen die idealen Voraussetzungen für Schleppangeln, pegalisches Angeln und Vertikalangeln.
Zu den Kernfunktionen der Bugmotoren von MotorGuide gehören die Steuerung über ein Fußedal oder eine kabellose Fernbedienung. Schließlich sollst du die Hände für das Wesentliche frei haben: das Angeln. MotorGuide-Fernbedienungen haben folgende Kernfunktionen:
- Geschwindigkeitsregelung
- Lenken
- Ein- und Ausschalten des Propellers
Mit Digital Power Management eignen sich die stufenlosen Elektromotoren hervorragend für ausgedehnte Touren. Dank der reibungslosen Geschwindigkeitregelung kannst du dich nicht nur genau auf Zielfische und Gewässer anpassen. Diese Technologie verlängert die Batterielaufzeit um das bis zu 5-fache, um länger auf dem Wasser bleiben zu können. Denn wir wissen: Für den großen Fang müssen Angler auf dem Wasser auch mal ausharren können.
Ein digitales Display am Motor zeigt das jeweilige Tempo gut erkennbar und genau an. Eine Besonderheit von MotorGuide sind Audiosignale, die über den jeweiligen Betriebsstatus informieren.
MotorGuide mit vollkommen neuen Steuerungskonzepten
Durch die Integration von GPS-Empfängern (u. a. bei MotorGuide Xi5 und Xi3) hat MotorGuide die Kontrolle und Funktionalität seiner Motoren nochmals deutlich erweitert. So kannst du beispielsweise den „Steuerkurs“ aktivieren, um in gerader Linie die Fahrtrichtung zu halten. Strömungs- und Windeinflüsse werden automatisch ausgeglichen. Darüber hinaus kannst du über die Fernbedienung Routen aufzeichnen, speichern und abrufen.
Das integrierte GPS bietet außerdem die Grundlage für einen sehr gut funktionierenden Ankermodus, der den Bug konstant auf Position hält. Strömung und Wind werden dabei automatisch berücksichtigt. Auch das Setzen der Ankerposition kannst du über die Fernbedienung vornehmen.

Brackwasser sind weiß lackiert.
Motoren „Made in USA“ – bei MotorGuide
MotorGuide lässt seine Motoren nach wie vor in den Vereinigten Staaten herstellen und legt besonderen Wert auf Zuverlässigkeit und Qualität. Die Verarbeitung von Gehäuse, Schaft und anderen Komponenten ist sehr gut. Die Lärmentwicklung während des Betriebs ist bemerkenswert gering, ebenso die Wärmeentwicklung – selbst bei hoher Belastung. Das trägt zur außergewöhnlichen Langlebigkeit der Motoren bei.
Aufgrund ihres geringen Gewichts und der einfachen Montage kannst du die MotorGuide Motoren außerdem problemlos zum Boot transportieren und schnell anbringen. Du findest bei MotorGuide passendes Zubehör für Elektro-Bootsmotoren wie Montageplatten und Elektronik-Zubehör.
Bugmotoren von MotorGuide gibt es sowohl für die Verwendung im Süßwasser (FW-Modelle) als auch im Salzwasser (SW-Modelle).
MotorGuide – seit der ersten Stunde für den Angelsport
Die Anfänge des Unternehmens reichen in die 1960er-Jahre zurück. Als G.H. Harris MotorGuide gründete, war es sein Ziel, einen funktionalen Motor für das Schleppangeln zu entwickeln. In den folgenden Jahren und Jahrzehnten hat MotorGuide eine ganz Reihe unterschiedlicher Innovationen hervorgebracht – immer mit dem Ziel, Fahr- und Lenkeigenschaften an die Anforderungen des Angelsports anzupassen.
So wurden die Elektromotoren von MotorGuide immer leistungsstärker, gleichzeitig kleiner und leichter. Zwei Meilensteine beo der Entwicklung ihrer Elektromotoren waren die stufenlose Geschwindigkeitsregulierung und die Integration von GPS. MotorGuide ist heute Teil der Brunswick Corporation.
MotorGuide Update
June 2019+ NEWER Xi Motor Update
Situation:
Eine aktuelle Software-Revision für die neuen Xi5- und Xi3-GPS-Module kommuniziert nicht richtig mit Lowrance Echoloten, wenn sie über das Gateway verbunden sind. Kunden, die einen Bugmotor mit Pinpoint GPS, ein Pinpoint-Gateway und ein Lowrance Echolot verwenden, erhalten möglicherweise auf dem Lowrance Gerät die Fehlermeldung, dass der Motor ein Update benötigt oder generell ein Update notwendig ist, wenn der Motor eingeschaltet ist. Weitere Probleme, die auftreten können, sind die nicht ordnungsgemäße Funktion von „Route verfolgen/Ankunft“ oder der vollständige Verbindungsverlust zum Lowrance Echolot.
Korrektur:
Das Problem kann vorübergehend durch Aus- und Einschalten des Motors und des NMEA 2000-Netzwerks behoben, kann jedoch nur mit einem Software-Update mit dem Update am Motor vollständig behoben werden.
Unterstützte Modelle:
Mit Gen2 GPS ausgestattete Xi5/Xi3 Motoren: 940800XXX & 941700XXX, 940700XXX & 941600XXX
Seriennummern: 9D411539 bis 9D490872
SWUP Update
Situation:
Eine aktuelle Software-Version der neuen Xi5-Steuerplatine kommuniziert nicht richtig mit dem Lowrance Echolot über das Gateway. Wer einen Xi5 Motor mit Pinpoint Gateway und Lowrance Echolot nutzt, erhält die Fehlermeldung „Trolling-Motor nicht ausgefahren“ oder „Kein AutoPilot Computer“ auf dem Display, wenn der Motor ausgefahren wurde. Dieser Fehler verhindert, dass das Lowrance Echolot mit dem Bugmotor kommuniziert und ihn steuert.
Status oder Korrektur:
Das Problem kann vorübergehend gelöst werden, indem der Motor aus- und wieder eingeschaltet wird. Um das Problem jedoch dauerhaft zu lösen, muss die Software bzw. das Gateway der Steuerplatine über das Lowrance Echolot und dem Pinpoint Gateway ein Update erfahren.
Betroffene Modelle:
| Modelle | Beschreibung | Seriennummer |
| Alle Modelle mit GPS & Gateway | Xi5 Motoren mit GPS, die Pinpoint Gateway nutzen | Nach 9D364014 (Juli 2017) und vor 9D411539 (Mai 2019) |
| Xi5/Xi3: 940800XXX & 941700XXX |
MotorGuide FAQ (Häufig gestellte Fragen)
Kann ich eine Montageplatte für meinen Bugmotor verwenden?
Ja, bei den Elektro-Bootsmotoren der Xi-Serie hast du die Wahl zwischen 3 Montageplatten:
- Schwarze Montageplatte aus Verbundwerkstoff
- Weiße Montageplatte aus Verbundwerkstoff
- Schwarze Montageplatte aus Aluminium
Auf der weißen Montageplatte stechen Salzwasserflecken nicht hervor und sind schwer zu sehen. Darum sind sie bei den SW-Modellen für den Salzwassereinsatz sehr beliebt.
Allerdings sind sowohl die schwarze als auch die weiße Montageplatte aus Verbundwerkstoff salzwasserbeständig und korrosionsresistent. Die Wahl der Montageplatte ist also nur eine Frage des Geschmacks.
Videoanleitung: So montierst du die Montageplatte
Welche Echolote sind mit dem integrierten 2D-Geber meines Motors kompatibel?
Die Geberkabel haben werkseitig einen 7-poligen BlueConnector als Anschluss fürs Echolot. Damit kannst du sie ohne Adapterkabel an folgende Echolote anschließen:
- Lowrance Elite-Serie
- Lowrance HDS-Serie
Außerdem sind folgende Echolote mit dem integrierten Geber kompatibel, wenn du das passende Adapterkabel verwendest:
| Lowrance | Lowrance 6-Pin | Garmin 6-Pin | Humminbird 7-Pin |
| Hook-Serie (Lowrance Geberadapter für Hook | Hook2 Echolote) | LCF-1440* | Echomap | HELIX |
| LST-3800* | GPSMAP | 500 | |
| M52i S/GPS | 600 | ||
| M56 | 700 | ||
| M-681 s/Map | 800 | ||
| X-22A | 900 | ||
| X-25A | 1000 | ||
| X-25B | 1100 | ||
| X-37TX* | |||
| X-45 | |||
| X-47/EX/TX* | |||
| X-50DS | |||
| X-67DC | |||
| X-86DS | |||
| X-96 |
*Ohne Temperaturanzeige
Welche Echolote sind mit dem integrierten HD+-Geber kompatibel?
Um den integrierten HD+-Geber zu nutzen, benötigst du das entsprechende Adapterkabel für dein Echolot:
- Lowrance 9-Pin-Adapterkabel: HDS LIVE, HDS Carbon, Elite FS, Elite Ti/Ti²
- Lowrance 7-Pin-Adapterkabel: HDS, HDS Gen2, HDS Gen2T, HDS Gen3, HDS Carbon, Hook/Hook²
- Humminbird 11-Pin-Adapterkabel: Solix, Onix
- Humminbird 7-Pin-Adapterkabel: HELIX, 500, 600, 700, 800, 900, 1000, 1100
- Garmin 8-Pin-Adapterkabel: GPSMAP, ECHOMAP
- Adapterkabel für Raymarine Element: Unterstützt nur die Frequenz 83/200 kHz
- Adapterkabel für Raymarine Axiom: Unterstützt nur die Frequenz 83/200 kHz
Hinweis
Neue Echomap-Geräte von Garmin mit einem gelben Geberanschluss benötigen den 8-Pin-zu-12-Pin-Adapter.Für Hook2-Echolote benötigst du zusätzlich den BlueConnector-zu-Hook2-Adapter.
Welcher Propeller passt zu meinem Elektro-Bootsmotor?
Die Motoren der Xi-Serie und Tour-Serie sind mit allen MotorGuide-Propellern kompatibel, deren Nabe einen Durchmesser von 3,5 Zoll hat. Dazu gehören diese Modelle:
- MotorGuide Safari (2-Blatt-Propeller)
- MotorGuide Katana (2- Blatt-Propeller)
- MotorGuide Machete (3- Blatt-Propeller)
Der 3-Blatt-Propeller Machete in Grau ist Standard beim MotorGuide Xi3 und MotorGuide Xi5.
Der MotorGuide Katana dagegen ist der Standardpropeller beim MotorGuide Tour und MotorGuide Tour Pro.
Wenn dein Bugmotor mit Pinpoint GPS ausgestattet ist, dann kannst du es an ein kompatibles Simrad- oder Lowrance-Echolot anschließen.
Damit du dein Echolot mit dem Bugmotor vernetzen kannst, benötigst du das NMEA Starter Kit und das NMEA Gateway Kit.
Folgende Echolote kannst du mit einem Elektromotor vernetzen, wenn er mit Pinpoint GPS ausgestattet ist:
- Lowrance HDS Gen2 / Gen 2 Touch / Gen3 / Carbon / LIVE
- Lowrance Elite-7 Ti / Ti² / FS
- Lowrance Elite-9 Ti / Ti² / FS
- Lowrance Elite-12 Ti / Ti²
- Simrad NSS EVO3
- Simrad NSS EVO2
- Simrad NS0 EVO2
- Simrad GO 7 und größer
Videoanleitung: So integrierst du deinen MotorGuide mit Pinpoint GPS ins Netzwerk
Wie richte ich den MotorGuide Xi3 auf meinem Boot bzw. Kajak ein?
Die Anleitung zu deinem Elektromotor erklärt ausführlich, wie du ihn auf dem Bug deines Boots bzw. Kajaks montierst. Falls du sie nicht findest, gelangst du hier zur Bedienungsanleitung.
Wenn dein Bugmotor nun fest und sicher sitzt, musst du abschließend nur noch die drei 3 Punkte ausführen:
- Propeller montieren
- Kielausrichtung kalibrieren (M112)
- GPS-Kompass kalibrieren (M111)
Wenn du die Einrichtung deines Motors abgeschlossen hast, ist er für das nächste Angelabenteuer einsatzbereit.
Wie verbinde ich meinen Xi-Motor mit meinem Kartenplotter?
Die Bugmotoren der Xi-Serie mit Pinpoint GPS kannst du an ein NMEA-2000-Netzwerk anschließen. Dafür benötigst du das MotorGuide NMEA 2000 Gateway-Kit. Nach Anschluss ans Netzwerk kannst du zusätzliche Funktionen auf dem Simrad- bzw. Lowrance-Echolot nutzen.
Falls nicht vorhanden, benötigst du für dein Echolot auch das MotorGuide NMEA 2000 Starter Kit, um es mit dem Bugmotor zu vernetzen.
Wie du deinen Bugmotor mit einem kompatiblen Echolot vernetzt, siehst du an diesem Beispiel:
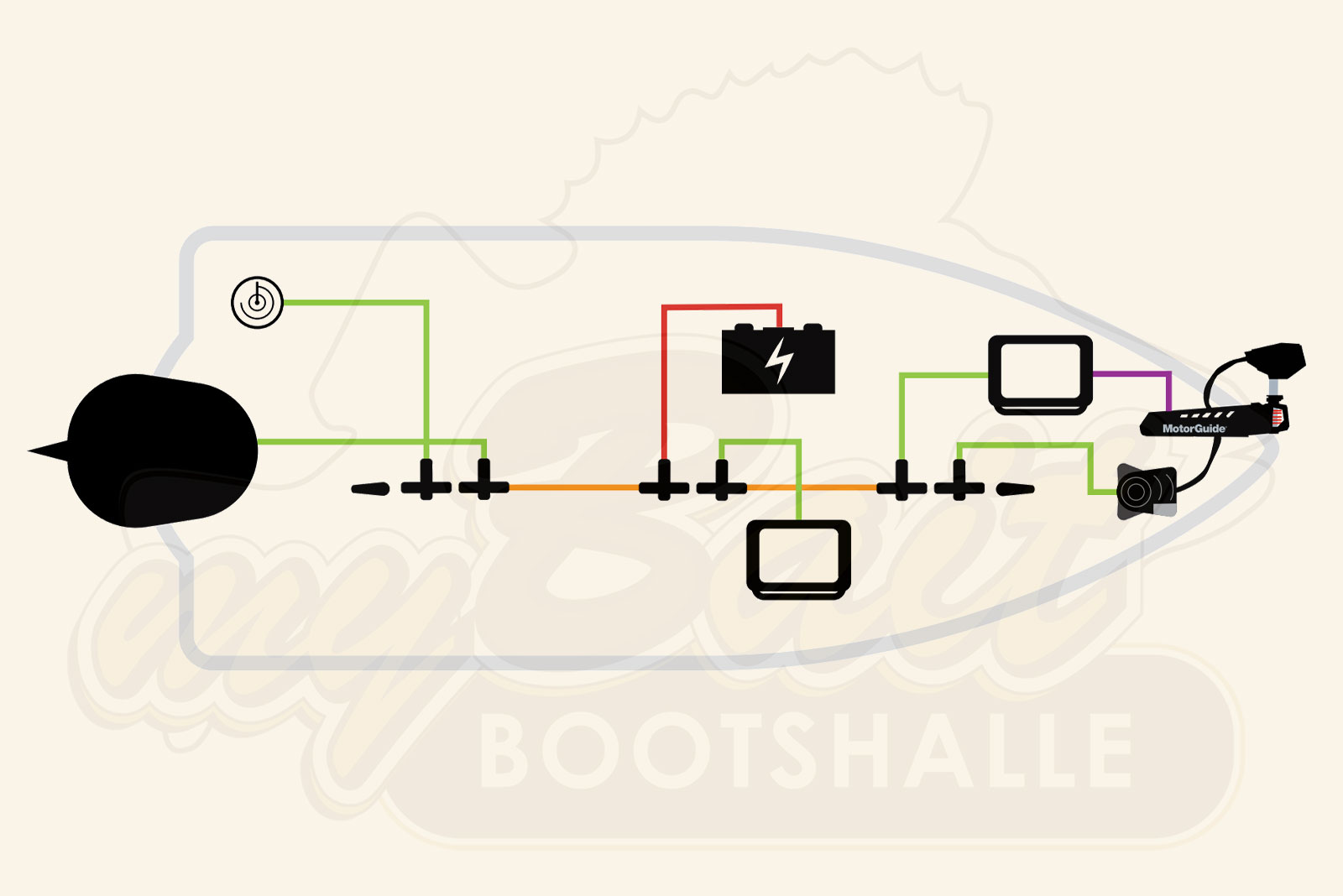
Achte bei deinem NMEA-2000-Netwerk darauf, dass du eine 12-Volt-Batterie als Stromquelle verwendest. Wenn du mehrere Stromkabel verwendest, um den Spannungsabfall zu verringern, dann sollten sie alle zur selben Batterie zurückführen.
Verlängere das NMEA-Kabel deines Xi-Motors NICHT bis zum Abzweig am NMEA-2000-Backbone. Wenn die Kabellänge nicht ausreicht, solltest du ein Verbindungsstück (T-Stück) in erreichbarer Nähe verlegen.
Worauf muss ich beim Pinpoint-GPS-Modul achten?
Die Verlegung der Kabel ist für die ordnungsgemäße Leistung des PinPoint GPS von entscheidender Bedeutung. Eine unsachgemäße Verlegung kann zu elektromagnetischen Störungen im oberen Modul führen.
Das untere Bild zeigt dir, wie du Kabellage korrekt wickelst.

Wann muss ich meinen Elektro-Bootsmotor kalibrieren?
Das kannst du an folgenden 2 Punkten feststellen:
- Dein Elektromotor seit der letzten Kalibrierung bereits über 250 Meilen hinterlegt; das entspricht in etwa über 400 km.
- Die GPS-Präzision nimmt ab.
In einem der beiden Fälle empfiehlt MotorGuide, den Bugmotor zu rekalibrieren, um die bestmögliche GPS-Genauigkeit zu gewährleisten.
Wie synchronisiere ich meine Fernbedienung?
Um deine Pinpoint-Fernbedienung mit deinem MotorGuide-Bugmotor zu synchronisieren, gehst du folgendermaßen vor:
- Du fährst deinen Elektromotor aus.
- Du schaltest ihn ein.
- Du hältst die Pfeiltasten Links & Rechts auf der Pinpoint-Fernbedienung ca. 5–10 Sekunden gedrückt.
Wenn du einen Piepton hörst, dann ist die Synchronisierung erfolgreich abgeschlossen. Andernfalls wiederhole diesen Vorgang.
Dieses Video zeigt, wie du die Pinpoint-Fernbedienung synchronisierst
Wie synchronisiere ich mein Fußpedal?
Mit folgenden Schritten synchronisierst du dein Fußpedal mit dem MotorGuide Xi-Motor:
- Bugmotor ausfahren
- Stecker ziehen bzw. Sicherungsautomaten ausschalten
- Stecker einstecken bzw. Sicherungsautomaten einschalten
- Ankertaste & „Constantly On“-Taste drücken und halten
Der Elektro-Bootsmotor gibt ein akustisches Signal wieder, wenn er mit dem Fußpedal erfolgreich synchronisiert ist.
Dieses Video zeigt, wie du dein Fußpedal synchonisierst
Wie erstelle ich für meinen Bugmotor eine Route, wenn er mit einem Lowrance-Echolot vernetzt ist?
Eine Route mit deinem Lowrance-Echolot, ist ganz einfach. Du setzt auf der Seekarte Wegpunkte, fügst sie zusammen und speicherst sie letztlich als eine Route ab. Danach kannst du deinem Bugmotor den Befehl geben, sie in eine Richtung zu fahren.
Willst du eine Route zum Angeln erstellen, kannst du Tiefenkarten als Hilfsmittel verwenden. Damit hebst du den Tiefenbereich farblich hervor, in dem du angeln willst. Innerhalb dieses Bereichs setzt du dann die Wegpunkte für deinen MotorGuide Xi3/Xi5 oder MotorGuide Tour bzw. Tour Pro.
Du hast 2 Möglichkeiten, um dir deinen Tiefenbereich anzeigen zu lassen:
Dir stehen folgende Möglichkeiten zur Verfügung, um dein Lowrance-Echolot mit einer Tiefenkarte auszustatten:
- Du lädst kostenlose Tiefenkarten auf C-MAP Genesis herunter.
- Du kaufst dir eine Seekarte von C-MAP.
- Du kaufst dir eine Seekarte von Navionics.
Es kommt auch mal vor, dass für bestimmte Gewässer keine Tiefenkarten existieren. Aber dafür gibt es auch eine Lösung: Du erstellst die Tiefenkarte selbst. Mit C-MAP Genesis Live auf deinem Lowrance-Echolot und einem Geber kartierst du deinen Lieblingsspot mit Konturen von etwa 15 cm.
Angelbereich einstellen
Die Funktion Angelbereich ist der einfache Weg, deinen Tiefenbereich einzustellen. Du wählst darin die Mindest- und Höchsttiefe aus, in der du angelst. Anschließend hebt deine Seekarte diesen Bereich farblich hervor.
Die Genauigkeit des Bereichs richtet sich nach den zugrunde liegenden Kartendaten. Wenn die Karte beispielsweise lediglich 5-Meter-Intervalle für Tiefenlinien aufweist, wird die Schattierung gerundet für die nächste verfügbare Tiefenlinie angezeigt.
Wenn du eine Navionics-Karte verwendest, findest du die Funktion im Menü deines Lowrance-Echolots unter „Mehr Optionen“ -> „Kartenptionen“ -> „Angelbereich“.
Wie das funktioniert, siehst du in diesem Video
Benutzerdefinierte Schattierung
Eine zweite Möglichkeit, den Tiefenbereich farblich hervorzuheben, erfolgt über benutzerdefinierte Schattierungen.
Diese Funktion erlaubt dir mehr Einstellungsmöglichkeiten. Unter anderem kannst du damit mehrere unterschiedliche Angelspots farblich voneinander getrennt hervorheben, wenn du unterschiedlichen Fischarten angelst.
Dafür änderst du die Farbschattierung von Tiefe 1 oder Tiefe 2 und aktivierst die benutzerdefinierte dann in deiner Kartendarstellung.
Du gelangst zu diesem Punkt im Menü unter „Weitere Optionen“ -> „Kartenoptionen“ -> „Schatten“ -> „Benutzerdefiniert“.
Wie du die Farbschattierung benutzerdefiniert darstellen kannst, siehst du in diesem Video
Wie kalibriere ich meinen MotorGuide-Motor?
Um deinen Elektro-Bootsmotor zu kalibrieren, benötigst du die Pinpoint-Fernbedienung. Mit diesen 6 Schritten führst du die Kalibrierung durch:
- Wenn du den Xi-Motor auf dem Wasser kalibrierst: Suche einen geeigneten Bereich für die Navigation ohne Hindernisse über und unter Wasser.
Wenn du den Xi-Motor auf dem Trailer kalibrierst: Suche einen geeigneten Bereich für deinen Trailer, um die Kompasskalibrierung durchzuführen. - Fahre den Bugmotor aus. Stelle die Motorhöhe so ein, dass sich der Motorkopf 15,2 cm (6 Zoll) über der Motorhalterung und der Tiefenbegrenzer (Depth Collar) befindet.
Wenn du die Kalibrierung im Wasser durchführst, dann stelle sicher, dass du nicht auf Grund oder andere Hindernisse stößt. - Halte die Taste für den manuellen Modus (M) gedrückt und drücke dann nacheinander 1, 1, 1. Der Bugmotor gibt 3 Pieptöne aus und die GPS-Statusanzeige erlischt.
- Wenn du den Motor im Wasser kalibrierst: Fahre langsam 2 vollständige Kreise mit deinem Hauptantriebsmotor.
Wenn du den Motor mit dem Trailer kalibrierst: Ziehe das Boot in 2 vollständigen Kreisen. - Der Motor gibt 2 Pieptöne wieder, wenn der zweite Kreis fast vollendet ist. Die GPS-Statusanzeige leuchtet auf und 1 Piepton signalisiert, dass die Kompasskalibrierung erfolgreich war.
- Wiederhole die Schritte 1–5 zwei weitere Male bei der Erstinstallation. So stellst du sicher, dass der Bugmotor speziell für das Boot und die geografische Region kalibriert ist.
Video: So kalibrierst du GPS-Kompass und Kielausrichtung an deinem MotorGuide
Hinweis
Eine feste GPS-Position (leuchtende GPS-Anzeige) und eine gekoppelte Pinpoint-GPS-Fernbedienung der Xi-Serie sind erforderlich, um die Kompasskalibrierung abzuschließen.Je öfter du den Motor kalibrierst, desto besser ist die GPS-Präzision. MotorGuide empfiehlt 2–3 vollständige Kalibrierungen für beste Ergebnisse.
Bei der Kompasskalibrierung solltest du die Kreise NICHT mit dem Bugmotor fahren, da dies die Leistung des Pinpoint GPS beeinträchtigen könnte.
Was muss ich tun, wenn ich meinen Elektromotor auf ein neues Boot umbaue?
Wenn du deinen Bugmotor von einem Boot auf ein anderes umbaust, empfiehlt MotorGuide, den Motor neu zu kalibrieren, um eine korrekte Kursausrichtung zu gewährleisten. Diese Kalibrierung nennt sich Kielausrichtung.
Um die Kielausrichtung durchzuführen, sind 2 Sachen erforderlich:
- Du brauchst eine feste GPS-Position (GPS-Anzeige leuchtet).
- Pinpoint-Fernbedienung muss mit dem Bugmotor gekoppelt sein.
Wenn dein Motor diese Anforderungen erfüllt, dann kannst du die Kielausrichtung mit diesen 4 Schritten kalibrieren:
- Schalte den Bugmotor ein und fahre ihn aus. Stelle die Motorhöhe so ein, dass sich die Unterseite des Kopfes 6 Zoll (ca. 15,3 cm) über m Tiefenbegrenzer (Depth Collar) befindet und der Motor keine Hindernisse berührt, wenn er sich um die eigene Achse dreht.
- Richte das Antriebsgehäuse bzw. Unterwasserteil mit den Pfeiltasten Links und Rechts so aus, dass es gerade und parallel zum Kiel steht. Die Spitze muss dabei nach vorne zeigen.
- Wenn die untere Einheit so nah wie möglich parallel zum Kiel positioniert ist, drückst und hältst du die Taste für den manuellen Modus (M).
- Während du die Taste M gedrückt hältst, drückst du nacheinander auf die Zahlen 1, 1, 2. Dein Xi-Motor gibt einen hörbaren Ton ab und die Kontrollleuchte blinkt, wenn der Vorgang abgeschlossen ist.
Du kannst die Kielausrichtung auch so wie in diesem Video kalibrieren
Wie gehe ich in den Kompassmodus bzw. Steuerkursmodus?
Du kannst deinen Xi-Bugmotor in 2 verschiedenen Steuerkursmodi betreiben:
- Kursmodus (Standard) durch Tastenkombination M + 2, 1, 1
- Kompassmodus durch Tastenkombination M + 2, 1, 2
Der Elektromotor hält im ersten Kursmodus den Kurs und navigiert entlang des letzten Richtungsbefehls und kompensiert Strömungs-, Gezeiten- und Windbedingungen. In diesem Modus stellst du die Geschwindigkeit und den Kurs über die Fernbedienung oder das Fußpedal ein.
Beim Kompassmodus hält der Bugmotor den letzten Befehl für den Steuerkurs fest. Das Boot treibt mit dem Wind, der Strömung und den Gezeiten. Der Elektro-Bootsmotor behält jedoch einen konstanten Steuerkurs bei. Geschwindigkeit und Kurs kannst du über die Fernbedienung oder das Fußpedal einstellen.
MotorGuide empfiehlt, jeden Kursmodus unter verschiedenen Bedingungen auszuprobieren, um herauszufinden, welcher für deinen Angelstil und deine Köderpräsentation am besten geeignet ist.
Wo finde ich die Seriennummer meines MotorGuide-Motors?
Wenn du einen MotorGuide Xi3 oder Xi5 benutzt, findest du die Seriennummer auf einem Aufkleber in der Halterung. Um ihn zu sehen, musst du den Motor ausfahren.
Bei dem MotorGuide Tour bzw. Tour Pro findest du den Seriennummernaufkleber unter dem Fußpedal. Damit du ihn siehst, musst du den Fußhebel bis zum Anschlag nach hinten treten. Danach siehst du den Aufkleber unter der vorderen Spitze der Trittfläche.
Was sollte ich immer an Bord mitführen?
Achte darauf, dass du immer die Fernbedienung, die GPS-Kurzanleitung und 2 neue AAA-Batterien dabeihast.
Was mache ich, wenn ich kein GPS-Signal erhalte oder der GPS-Anker nicht funktioniert?
In diesem Fall besteht kein Grund zur Sorge. MotorGuide stellt einen Leitfaden bereit, sodass du den Fehler an deinem Elektromotor beheben kannst.
Da sich die Motoren der Xi-Serie und Tour-Serie voneinander unterscheiden, gibt es 2 unterschiedliche Leitfäden:
- Hier springst du zu dem Leitfaden für den MotorGuide Xi3/Xi5.
- Hier springst du zu dem Leitfaden für den MotorGuide Tour bzw. Tour Pro.
So behebst du den Fehler an deinem MotorGuide Xi3/Xi5:
- Prüfe das GPS-Signal innerhalb von 5 Minuten nach dem Einschalten in ausgefahrener Position.
Wenn kein Signal vorhanden ist, dann schalte den Motor aus, während er ausgefahren ist. - Prüfe die Umweltfaktoren (Anker in der Nähe, Lautsprecher, Sedimente im Eisenerzsee, für die nationale Sicherheit kritische Infrastruktur)
- Prüfe, ob du dich nicht unter einer Brücke oder einem überhängenden Bauwerk befindest.
- Prüfe, ob der Xi-Motor sicher an der Halterung befestigt ist und kein Spiel in der Halterung zum Boot hat.
- Prüfe, ob die GPS-Kompasskalibrierung (M111) zweimal abgeschlossen wurde und schalte das Gerät zwischen den Kalibrierungen aus.
- Prüfe, ob die Kalibrierung der Kielleinstellung (M112) abgeschlossen ist.
- Stelle sicher, dass die elektrischen Kabel unter der Kopfabdeckung ordnungsgemäß verlegt sind (siehe dazu die Bilder). Die Kabel müssen wie ein Zopf ineinander gewickelt werden.
- Wenn die elektrischen Kabel im Kopf neu verlegt werden mussten, führe die Kieleinstellung (M111) erneut aus.
- Führe einen HARD RESET durch
- Schalte dazu den Bugmotor aus (Stecker ziehen oder Sicherungsautomaten ausschalten).
- Trenne das Minus- und Pluskabel von der Motorbatterie.
- Setze den Sicherungsautomaten oder stecke den Stecker des Xi-Motors ein, während die Kabel abgeklemmt sind.
- Fahre den Bugmotor aus.
- Vergewissere dich, dass KEINE Lichter auf der LED-Platine leuchten.
- Halte das Minuskabel mit dem Pluskabel 20 Sekunden lang in Kontakt (dadurch werden die Kondensatoren auf der Steuerplatine entladen).
- Schalte den Bugmotor über den Sicherungsautomaten aus oder ziehe dazu den Stecker heraus.
- Schließe das Minuskabel und das Pluskabel wieder an die Batterie an.
- Schalte den Xi-Motor wieder ein.
- Wiederhole die Schritte 5 und 6.
- Teste den Motor erneut.
Wenn diese Schritte nicht geholfen haben, dann nimm bitte mit uns Kontakt auf.
So behebst du den Fehler an deinem MotorGuide Tour bzw. Tour Pro:
- Prüfe das GPS-Signal innerhalb von 5 Minuten nach dem Einschalten in ausgefahrener Position.
Wenn kein Signal vorhanden ist, dann schalte den Motor aus, während er ausgefahren ist. - Prüfe die Umweltfaktoren (Anker in der Nähe, Lautsprecher, Sedimente im Eisenerzsee, für die nationale Sicherheit kritische Infrastruktur)
- Prüfe, ob du dich nicht unter einer Brücke oder einem überhängenden Bauwerk befindest.
- Prüfe, ob du die Kompasskalibrierung (M111) vollständig abgeschlossen hast.
- Prüfe, ob du die Kalibrierung der Kielausrichtung (M112) vollständig abgeschlossen hast.
- Kalibriere die Anschläge des Fußpedals (M284):
- Fahre den Motor aus und stelle sicher, dass er sich um 360 Grad drehen kann, ohne dass das Antriebsgehäuse auf Hindernisse stößt. Der Motor muss eingeschaltet, aber der Propeller ausgeschaltet sein.
- Positioniere den Fußhebel in die neutrale Auslage (mittig).
- Halte mit der gekoppelten Pinpoint-Fernbedienung die Taste M gedrückt und drücke nacheinander die Zahlen 2, 8, 4. Das Fußpedal fährt damit in beide Endpositionen, schlägt also vorne und hinten bis zum Ende an.
Wenn die die Kalibrierung abgeschlossen ist, bleibt das Fußpedal länger als 10 Sekunden am hinteren Anschlag. - WICHTIG: Nach der Kalibrierung des Fußpedals sollte ein Neustart durchgeführt werden.
- Kalibriere das Sensormodul (M285):
- Fahre den Motor aus und stelle sicher, dass er sich um 360 Grad drehen kann, ohne dass das Antriebsgehäuse auf Hindernisse stößt. Der Motor muss eingeschaltet, aber der Propeller ausgeschaltet sein.
- Drücke den Fußhebel um 3/4 nach hinten durch.
- Halte mit der gekoppelten Pinpoint-Fernbedienung die Taste M gedrückt und drücke nacheinander die Zahlen 2, 8, 5. Das Fußpedal fährt damit in beide Endpositionen, schlägt also vorne und hinten bis zum Ende an.
Wenn die die Kalibrierung abgeschlossen ist, bleibt das Fußpedal länger als 10 Sekunden am vorderen Anschlag. - WICHTIG: Nach der Kalibrierung des Fußpedals sollte ein Neustart durchgeführt werden.
- Prüfe die Spannung der Bowdenzüge. Eine zu lockere oder feste Spannung vermindert die Genauigkeit.
- Nehme das Fußpedal vom Deck ab, um zur Stellschraube für die Kabelspannung zu gelangen. Du findest sie am Ende des Kabelschlauchs.
- Stelle die Kabelspannung ein, indem du die Schraube drehst. Um die Spannung zu erhöhen, drehst du sie im Uhrzeigersinn. Willst du sie stattdessen lockern, drehst du die Schraube gegen den Uhrzeigersinn.
- Stelle die Spannung so ein, dass das Spiel auf der Trittfläche minimal ist. Trete es danach in beide Richtungen durch.
Die Einstellung der Zugspannung ist sehr empfindlich. Daher solltest du die Schraube max. zu 1/4 drehen. - Stelle sicher, dass das Pedalkabel weder geknickt noch verdreht ist.
- Verwendete die gekoppelte Pinpoint-Fernbedienung, um zu überprüfen, dass das Kabel nicht zu stark gespannt ist.
- Drücke den Fußhebel komplett nach vorne durch.
- Halte den linken Pfeil auf der Fernbedienung gedrückt, damit der Motor sich dreht, bis der Fußhebel nach hinten durchgedrückt ist.
- Halte den linken Pfeil auf der Fernbedienung gedrückt, damit der Motor sich dreht, bis der Fußhebel nach vorne durchgedrückt ist.
Der Kopf sollte sich um 360 Grad drehen, ohne zu blockieren. Sollte das jedoch der Fall sein, verringerst du die Kabelspannung. - Wiederhole die Kalibrierung M284 und M285, wenn du die Spannung eingestellt hast.
Hier siehst du, wie du dein Fußpedal kalibrierst
Was mache ich, wenn ich kein Signal vom integrierten Geber erhalte?
- Verringere die Sonarempfindlichkeit. Alternativ lautet die Bezeichnung auch Verstärkung. Siehe dazu in die Unterlagen deines Echolots.
- Ändere die Empfindlichkeit auf eine automatische Einstellung.
- Wenn die automatische Einstellung die Störung nicht reduziert, dann ändere die Empfindlichkeit manuell auf 55–65 % der maximalen Einstellung.
- Vergewissere dich, dass das Geber- oder Netzwerkkabel, die an das Echolot angeschlossen sind, nicht in der Nähe der Stromkabel des Bugmotors oder der Batterien verlegt sind.
- Stelle sicher, dass die positiven (+) und negativen (-) Stromkabel nebeneinander verlegt sind. Dies hilft, elektromagnetische Störungen zu unterdrücken.
- Untersuche das Geberkabel auf Schäden, Kerben und Schnitte. Wenn es beschädigt ist, muss es ersetzt werden.
- Schließe das Echolot an eine separate Batterie an. An diese Batterie darf ausschließlich nur das Echolot angeschlossen sein. Auf diese Weise stellst du fest, ob die Störungen von den Stromkabeln oder dem Geberkabel ausgehen.
- Wenn die Störung nicht auftritt, sobald das Echolot an eine separate Batterie angeschlossen ist, dann überprüfe die Bootsverkabelung. Höchstwahrscheinlich liegt ein Problem mit dem Masseanschluss (-) vor.
- Wenn die Störung weiterhin besteht, dann kommt sie wahrscheinlich vom Geber oder Geberkabel
- Wenn du ein Ethernet-Netzwerksystem an Bord verwendest, dann schalte zu einem anderen Geber im Netzwerk um, der am weitesten vom Bugmotor entfernt ist.
- Installiere eine Ferritperle (HF-Drossel) an den Stromkabeln der Echolote an, die Störungen aufweisen.
- Entferne den Propeller vom Motor und teste erneut, ob Propellerschwingungen die Störung verursachen.
Wenn diese Schritte nicht geholfen haben, dann nimm bitte mit uns Kontakt auf.
Wie lagere ich meinen Motor am Ende des Tages richtig?
Ziehe immer den Stecker ab oder schalte den Sicherungsautomaten aus, bevor du ihn auflädst. Die Schaltkreise und Komponenten an Bord deines Motors der Xi-Serie müssen die Möglichkeit haben, sich zurückzusetzen, um optimal zu funktionieren.
Überprüfe auch den Propeller sowie die Propellerwelle und entferne jegliche Verschmutzungen.
Wie bereite ich meinen Elektro-Bootsmotor auf die Überwinterung oder eine langfristige Lagerung vor?
Lagere deinen Elektromotor an einem trockenen Ort, an dem er nicht Temperaturen unter -28 °C ausgesetzt ist.
Wenn der Motor bei Temperaturen unter 0 °C aufbewahrt wird, dann sollte er in den ersten 15 Minuten langsam betrieben werden, bevor du ihn mit mehr als 30 % Last betreibst.
Wenn der Motor nach 15 Minuten Betreib oder bei mehr als 50 % Last zu wenig Leistung bringt oder sich ganz abschaltet, dann überprüfe folgende Punkte:
- Spannung der einzelnen Motorbatterien
- Durchgang der Sicherungsautomaten für den Elektro-Bootsmotor
- Lose Verbindungen an der Batterie
- Ladung einzelner Batterien
- Spannung von 12/24/36 V am Elektro-Bootsmotor und entlang der Stromleitung
Wie verlege ich die Kabel an dem MotorGuide Tour Pro richtig?
Vermeide die Verwendung von Kabelbindern, wenn du die Kabel verlegst. Sie können nämlich zu einer übermäßigen Kabelspannung führen. Dadurch nimmt unter anderem die Leistung des Pinpoint GPS und der Steuerung des Motors ab.
Wenn du Kabelbinder verwendest, dann achte darauf, dass du sie lose anbringst. Du kannst als Alternative auch einen Kabelschlauch verwenden, um die Kabel ordnungsgemäß zu verlegen, ohne die Funktionstüchtigkeit einzuschränken.
In diesem Video siehst du, wie du Kabel gut verlegen kannst
Wann sollte ich meinen MotorGuide Tour bzw. Tour Pro ölen?
Du solltest deinen Elektromotor entweder alle 100 Betriebsstunden oder einmal im Jahr schmieren.
Dafür gehst du folgendermaßen vor:
- Entferne verunreinigte Schmiermittel und Schmutz an deinem Bugmotor.
- Verwende für Verriegelungshaken und Schließbleche mit Schmierfett. MotorGuide verwendet dafür sein hauseigenes Schmierfett: MotorGuide Tour Latch Grease.
- Die Drehbolzen kannst du auch mit WD-40 schmieren.
Was soll ich tun, wenn mein MotorGuide Tour bzw. Tour Pro extrem quietscht?
Vergewissere dich, dass der Schaft mit seiner Federhalterung vollständig eingerastet ist und die Schrauben festgezogen sind. Stelle außerdem sicher, dass das Verriegelungssystem ordnungsgemäß geschmiert ist.
Wie du das Verriegelungssystem der Motorhalterung schmierst, erfährst du hier.
Wie ersetze ich das Kabel des Lift-Assist-Systems an meinem MotorGuide Tour bzw. Tour Pro?
- Löse die Schrauben am Kabelgriff und entferne den Griffdeckel.
- Ziehe das Kabel aus dem Griff heraus.
- Entferne die Feder an der Motorhalterung von der Kabeldurchführung. Es reicht, sie nur ein Stück zur Seite zu schieben, um das Kabel aus der Durchführung herausziehen zu können.
- Ziehe das Kabel aus der Motorhalterung heraus.
- Führe das neue Kabel aus dem Austauschset durch das Kabelkanal. Wenn es am anderen Ende nicht herauskommt, hilft es, das Kabel zu drehen. Sollte es wegen Widerstands knicken, greife unter der Motorhalterung mit einer Hand danach, um es zu vermeiden.
- Tritt das Kabel am anderen Ende aus, ziehe es vollständig durch, bis es anschlägt.
- Führe das herausgetretene Ende durch das Loch am Griff.
- Lege das neue Kabel wie das alte entlang der Kabelführung im Griff und klemme sie durch Eindrücken fest.
- Setze den Griffdeckel auf den Griff und schraube ihn fest.
So solltest du das Kabel im Griff durch die Kanäle führen:

Das Endstück auf dem Bild führst du ebenfalls durch den zweiten U-Tunnel und klemmst es darin fest.
Videoanleitung: So tauschst du das Kabel an deinem MotorGuide Tour aus
Wie stelle ich den Widerstand meines Fußpedals ein?
- Nehme das Fußpedal vom Deck ab, um zur Stellschraube für die Kabelspannung zu gelangen. Du findest sie am Ende des Kabelschlauchs.
- Stelle die Kabelspannung ein, indem du die Schraube drehst. Um den Widerstand am Fußpedal zu erhöhen, drehst du sie im Uhrzeigersinn. Willst du sie stattdessen lockern, drehst du die Schraube gegen den Uhrzeigersinn.
- Stelle den Widerstand so ein, dass das Spiel auf der Trittfläche minimal ist. Trete es danach in beide Richtungen durch.
Die Einstellung der Zugspannung ist sehr empfindlich. Daher solltest du die Schraube max. zu 1/4 drehen. - Stelle sicher, dass das Pedalkabel weder geknickt noch verdreht ist.
- Verwendete die gekoppelte Pinpoint-Fernbedienung, um zu überprüfen, dass das Kabel nicht zu stark gespannt ist.
- Drücke den Fußhebel komplett nach vorne durch.
- Halte den linken Pfeil auf der Fernbedienung gedrückt, damit der Motor sich dreht, bis der Fußhebel nach hinten durchgedrückt ist.
- Halte den linken Pfeil auf der Fernbedienung gedrückt, damit der Motor sich dreht, bis der Fußhebel nach vorne durchgedrückt ist.
Der Kopf sollte sich um 360 Grad drehen, ohne zu blockieren. Sollte das jedoch der Fall sein, verringerst du die Kabelspannung. - Wiederhole die Kalibrierung M284 und M285, wenn du den Widerstand eingestellt hast.